Match Each Linear Transformation With Its Matrix
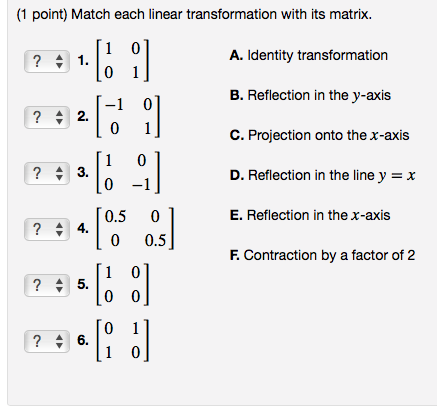
Match each linear transformation with its matrix Rotation through an angle of 90 degree in the counterclockwise direction Dilation by a factor of 2 Reflection in the x-axis Reflection in the y-axis Reflection in the line y X Reflection in the origin. 1 0 -1 E.
Linear Transformation Examples Scaling And Reflections Video Khan Academy
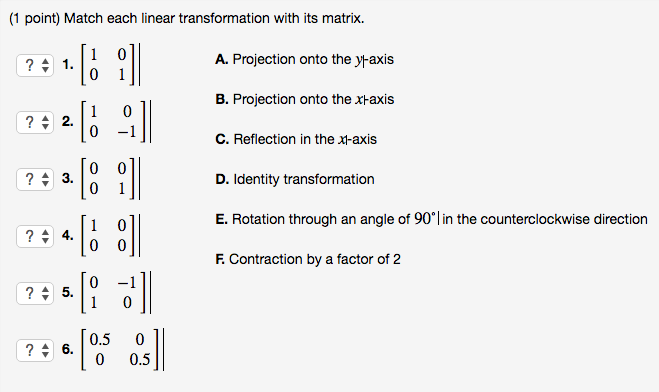
Projection onto the y-axis 4.
. 1 0 0 1 4. Let the transformation T. Reflection across the line y x D v 5.
3 columns so that the matrix-vector product Ax is de ned for x in R3. Reflection in the line y x D. Match each linear transformation with its matrix.
As illustrated in blue the number of rows of the T corresponds to the number of dimensions of the output. Projection onto the x-axis C. Rotation through an angle of 90 in the counterclockwise direction E.
Match each linear transformation with its matrix. Figure 3 illustrates the shapes of this example. Reflection across the origin -1 2.
Math Advanced Math QA Library Match each linear transformation with its matrix. Reflection in the y-axis E. Contraction by a factor of2 B.
R2 R2 L x y 1 1 0 1 x y. A a 11 a 12 a 21 a 22 a 31 a 32. Consider a linear operator L.
Contraction by a factor of 2. Contraction by a factor of 2. Let S be the matrix of L with respect to the standard basis N be the matrix of L with respect to the basis v1v2 and U be the transition matrix from v1v2 to e1e2.
Scaling transformations can also be written as A λI2 where I2 is the identity matrix. 1 point Match each linear transformation with its matrix. For the codomain of T to be R4 the columns of A must have 4 entries that is A must have 4 rows since Ax is a linear combination of the columns of A.
Reflection in the origin C. Reflection in the r-axis 0 -1 1 point Match each linear transformation with. Rotation through an angle of 90 in the clockwise direction C.
Reflection in the r-axis 0 -1. Dilation by a factor of 2. The matrix A associated with f will be a 3 2 matrix which well write as.
Projection onto the x-axis 0 1 0 A. Then N U1SU. Rotation through an angle of 90 in the clockwise di- rection C.
Rotation through an angle of 90 in the clockwise direction C. Contraction by a factor of 2 F. Projection onto the y-axis D.
In this chapter we return to the study of linear transformations that we started in Chapter 3. Reflection in the y-axis B. T x 1 x 2 x 3.
X n T x 1 x 2 x 3. You only have 3 attempts. Reflection in the line yx D.
Rotation through an angle of 90. Reflection in the origin 1. Dilation by a factor of 2 E.
1 point Match each linear transformation with its matrix. In the clockwise direction B. 0 -1 1 0 2.
Reflection in the y-axis E. Reflection 3 A cos2α sin2α sin2α cos2α A 1 0 0 1 Any reflection at a line has the form of the matrix to the left. 2 0 0 2 5.
Reflection in the origin D. For u 1 u 2 v 1 v 2 V and a R define vector addition 1. Projection onto the y-axis B.
Projection onto the y-axis D. The ideas presented here are related to finding the simplest matrix representation for a fixed linear transformation. X n Now as long as you fix two bases B 1 and B 1 for R n and R m this Linear Transformation is uniquely determined by the given matrix.
S 1 1 0 1 U 3 2 1 1 N U1SU. Match each linear transformation with its matrix. Reflection in the y-axis 0 1 -1 0 B.
Actually fixing two bases we can define a bijection between the set M m n and the set of Linear Transformations from R n R m. 1 pt Match each linear transformation with its matrix. R2 be de ned by Tx Tx1x2x3 x1 5x2 4x3x2 6x3.
Projection onto the y -axis 1. Compute Tx for any x 2 4 x 1 x 2 x 3 3 5 2 IR 3 and determine the matrix A that. The first matrix with a shape 2 2 is the transformation matrix T and the second matrix with a shape 2 400 corresponds to the 400 vectors stacked.
Rotation through an angle of 90 degree in the clockwise direction 1 0 0 -1 D. Match each linear transformation with its matrix. Featured on Meta Stack Exchange QA access will not be.
Determine which of the following subsets of R 3 3 are subspaces of R 3 3 2. Reflection in the origin F. Match each linear transformation with its matrix.
Rotation through an angle of 90 in the counterclock- wise direction F. Reflection in the y-axis. A reflection at a line containing.
We need A to satisfy f x A. By signing up youll get thousands of step-by-step solutions to your homework. For uv V and a R define vector addition by u v u v 2 and scalar multiplication by a u au 2 a 2 6.
Tc 1v 1 c 2v 2 c pv pc 1Tv 1c 2Tv 2c pTv p. TO 07 0 1 C. One can also look at transformations which scale x differently then y and where A is a diagonal matrix.
Rotation through an angle of 90 in the counterclockwise direction -1 0 05 0 0 05 0 -1 F. Reflection in the line y x B. Contraction by a factor of2 B.
Reflection in the x-axis -1 0 0 1 C. Projection onto the y-axis A 4. The projection onto the x-axis given by T xy x0.
Counterclockwise rotation by π2 radians. Rotation through an angle of 90 in the clockwise direction. Match each linear transformation with its matrix.
Browse other questions tagged linear-algebra matrices linear-transformations or ask your own question. They are also called dilations. IR m is a linear transformation then TcudvcTudTv.
Example Suppose T is a linear transformation fromRI3 toRI4 with Te 1 2 6 6 4 2 3 4 5 3 7 7 5Te 2 2 6 6 4 5 0 1 1 3 7 7 and Te 3 2 6 6 1 2 0 7 3 7 7. Rotation through an angle of 90 in the clockwise direction E 2. Match each linear transformation with its matrix.
As you recall a matrix representation is determined once the bases for the two vector spaces are picked. Projection onto the x-axis. Shape of the transformation of the grid points by T.
Rotation through an angle of 90 in the counterclockwise direction -1 0 05 0 0 05 0 -1 F. Clockwise rotation by π2 radians. Find the matrix of L with respect to the basis v1 31 v2 21.
Lets take the function f x y 2 x y y x 3 y which is a linear transformation from R 2 to R 3. Reflection about the x-axis. Rotation through an angle of 90 degree in the counterclockwise direction 1 0 0 1 E.
Rotation through an angle of 90 in the counterclockwise direction Г2 0 E. Note that both functions we obtained from matrices above were linear transformations. 0 1 1 0 3.
Dilation by a factor of 2 C ŷ 3. -2 1 A 3 x y- 2z T y yx 5 1 1 CH3 х - 2у Зx 5у B S y 1 1 -2 Зх2у-22 z - 2y 5x 1 1 -2 P y C 1 1 x y 3 D 2. 2 0 0 2 A.
Match the following linear transformations with their associated matrix. 0 1 -1 0.
Solved 1 Point Match Each Linear Transformation With Its Chegg Com
Solved Match Each Linear Transformation With Its Matrix 1 Chegg Com

Diagonal Matrix An Overview Sciencedirect Topics



Comments
Post a Comment